最新的驾驶帮助体系(DAS)技巧经由过程“传感器数据融合”,把来自不合信息源,如雷达、摄像头、全球导航卫星体系、路边基本举措措施及其他车辆信息的传感器数据结合起来,形成更周全的有关门路状况的申报,让车辆和门路更安然,而单个传感器很难实现这一功能。
图像合成
驾驶帮助体系(DAS)正获得越来越广泛的应用。无论是正在开辟中的,照样已经量产的,最新的DAS体系可以赞助驾驶者更好地根据当时的路况来控制车辆。车袈湄传感器可以探测车辆四周的情况,包含车道、障碍物,以及门路上的其他车辆。更先辈的车袈湄技巧甚至可以经由过程安装在其他车辆上的长途传感器,以及门路两旁的基本举措措施来接收信息。
一般的车辆传感器平日只有某个特定用处。例如,雷达用于物体探测,超声波传感器用于泊车监测,摄像头用于车道监测,每一个传感器只能供给情况的一部分信息。复杂的传感器数据融合技巧结合潦攀来自不合信息源的数据,大年夜而形成一套周全的情况信息。传感器数据融合的长处包含:
1.进步测量精度,包含进步精确度、周详度、靠得住性、降低缺点/缺掉检测率,并降低测量噪声;
2.车道监测数据
2.扩大年夜测量范围,例如,结合具有不合测量范围的传感器;
3.进步传感器探测车辆四周情况的鲁棒性;
4.经由过程传感器协同感化获得的额外数据,例如:一个传感器用来测量车辆与物体间的距离,另一个传感器用来测量相对速度,把两个传感器的数据结合起来,就可以
英国沃森获得车辆的抵达时光。
传感器数据融合须要高的处理速度和内存设备。经由过程更高规格的处理器、高效算法在软件和硬件中的应用,以及新的电路技巧,电子储存和处理才能都获得了进步,这意味着可以实现批量临盆。本文将介绍部分传感器的协同感化。
雷达传感器
3.ACC雷达融合
用于汽车行业的雷达,根据其探测距离的不合可分为长途、中程和短程三大年夜类。TRW专注于长途和中程雷达的研发,用于物体分类和路面信息探测。
1.长途雷达(76~77GHz)
汽车袈涠程雷达的频率是76~77GHz,平日用来测量目标区域、相对速度和角地位。最大年夜探测距离平日在180~250m之间,程度视野范围是12°阁下(而16~18°正成为新的标准)。
TRW下一代长途雷达具有一个卡塞格伦天线,可以扩大年夜视野范围,还有一个调频、频移键控调控技巧(FMFSK)。该产品可用于碰撞预警体系,以加强对静止障碍物的探测。
2.中程雷达(24GHz)
TRW开辟的24GHz中程雷达,最大年夜探测距离达150m,有效控制距离100m,并且程度视野异常宽。该产品已经进行了成本优化,确保其可以应用到更多不合级其余车辆上。
该雷达还可以应用到碰撞预警体系、侧向“车道偏离帮助”和“盲点监测”体系中(注:24GHz雷达不受欧盟超宽带立法限制,该立法将于2013年生效,影响范围是工业、科学和医疗频段)。
3.视觉体系
视觉体系平日包含了摄像头、图像处理硬件,以及数据传输办法。摄像头用来捕获可见光图像,大年夜中提取“特点”。
视频图像处理是典范的计算密集型技巧。然而,汽车功能的履行须要经由过程强大年夜的处理电子的应用来实现,广泛应用的低成本拍照机使得摄像体系的成本效益成为可能。TRW的车道监测就是如许一个体系,经由过程辨扰绫桥路标识(例如:外车道上的人行道边线、分隔迎面驶来的车辆的┞筏栏),来揣摸车辆的地位、行驶偏向,以及门路的曲折度。这些信息用来警醒驾驶者产生车道偏离的可能,方法有声频警告(如蜂鸣)、视觉提示和触觉反馈(如可震动的偏向盘)。
汽车传感器数据融合案例
充分应用数据融合的前置雷达和视觉体系,如今已经应用到量产车上。尽管鄙人文中没有明白解释,但其他几种传感器,如轮速传感器、偏航率传感器和横向加快度传感器,也能进行数据融合,进一步进步体系机能。
1.车道偏离帮助
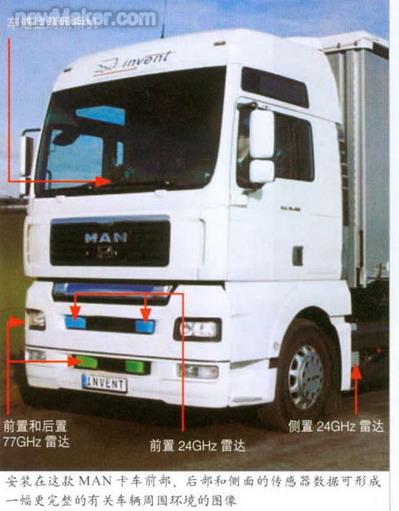
车道偏离帮助须要探测车辆四周的情况,仅靠一个传感器来探测邻近所有车辆的信息是不切实际的,是以须要一组传感器来覆盖所需的探测范围。TRW Conekt(TRW工程办事机构)在德国曼(MAN)商用车公司的一辆26t商用车上安装了一组传感器,用来介入德国汽车工业与门路研发项目INVENT。INVENT项目标目标是进行门路交通研究,以改进交通流并削减变乱。这组传感器由两个TRW的77GHz雷达传感器、三个第三方24GHz传感器以及一个TRW车道摄像头监测体系构成就见图1)。
图1 经由过程传感器数据的融合来为车道偏离供给帮助图2为该传感器组所能达到的探测范围。
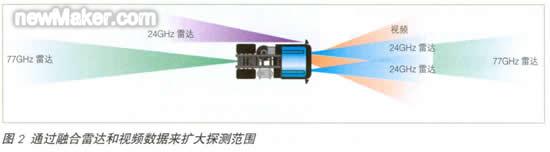
雷达能供给主车与其他车辆相对地位的信息。该雷达数据邮攀来自车道视频监测体系的信息相融合,大年夜而产生一个车辆相对于门路的地位图像。该信息可用于车道偏离或盲点帮助体系。
若想进步车辆相对于车道的横向地位精度,可以把来自全球导航卫星体系与摄像头车道监测体系的信息进行融合。横向和纵向定位精度都可进一步进步,办法是匹配和比较视频图像特点及GNSS地图特点。这只是DAS应用基本举措措施信息体系的一个例子。
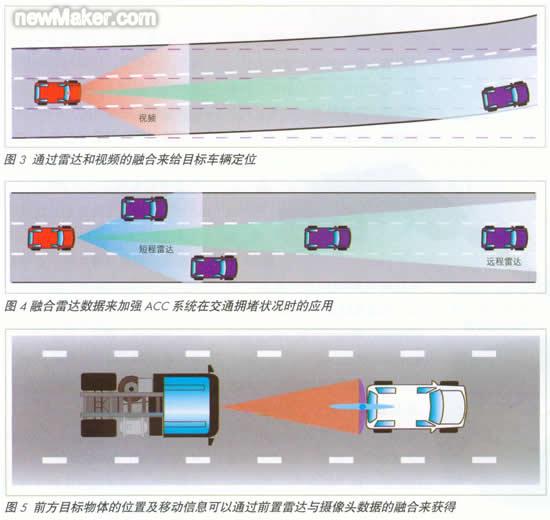
ACC体系可以获知主车是否与前方丰辆处于同一车道上。如不雅是,则主车的车速可能会放缓,以保持体系所设定的间距。体系可应用来自摄像头体系的车道监测数据,给门路上的其他车辆定位,大年夜而决定主车是否保持与其他车辆的间距(见图3)。
4.物体探测
TRW的雷达传感器可用于精确典范围测量和视觉体系的角测量。经由过程融合技巧把这些可互补的测量办法结合起来。这比拟于单个传感器的工作,可以或许更精确地给目标物体定位。图5展示了TRW技巧若何把雷达和视频数据进行融合,给前方车辆准肯定位。车辆定位可用于碰撞预警和主动紧急制动。两个传感器自力工作,以确认物体的存在。
5.GNSS定位
ACC体系也可应用来自于车袈湄导航体系的信息。车袈湄导航体系结合了车袈湄地图和全球导航卫星体系(GNSS)定位。然而,GNSS定位的精确性和有效性有时会比较差,尤其是在建筑物覆盖区。
为了支撑ACC体系的停-启功能(也称交通拥堵帮助功能),必惺攀扩大年夜车辆邻近区域的物体监测范围。如图4所示,这可以经由过程一个长途雷达和一个具有宽敞视野的短程雷达的融合来实现。部分供给商经由过程应用短程雷达+长途雷达,或中程雷达+长途雷达来实现这个功能,但TRW的策略是经由过程结合雷达和视频传感器来实现。
6.基本举措措施与车辆及车辆与车辆间的通信
基本举措措施与车辆、车辆与车辆间通信的技巧进步,使得安装在车身外的传感器信息可以被充分应用,大年夜而建立更完全的有关车辆四周情况及定位的图像(例如,经由过程GNSS体系)。事实上,这些通信技巧的进步,也供给了更周全的情况信息,大年夜而为早期预警和处理即将产生的问题供给赞助。
瞻望
除潦攀雷达和视觉体系,其他传感器也可用于测量车辆特定的情况信息。例如,立体视觉、远红外线传感器、3D拍照机和激光扫描仪都可用作情况传感器,为驾驶者供给赞助,避免或削减变乱的严重程度。
别的,传感器数据的融合也使得DAS体系可以或许为保护情况做供献。例如,经由过程传感器数据融合揣摸出来的一些门路情况的细节信息(比如斜坡),可用于调节发念头治理体系及主动变速器的运转,大年夜而获得更好的燃油经济性。这一点对混淆动力传动体系尤为有效。(end)