OGP SmartScope多元传感测量体系用於三维尺寸测量,该体系应用两个或多个不合传感器技巧大年夜工件外面获取数据点,与在一台设备上应用单个传感器进行测量比拟,可实现更多的测量。传感器的选择取决於须要测量工件的尺寸与外形、色彩和反射率、外面的光洁与质地、材质和硬度。
明智的选择
下面须要测量的零件有一组孔和槽,位於不合深度的外面和一些复杂的细节。
假设图1b中 CAD模型的蓝色标出的边沿须要测量,以肯定它们之间的距离。可假设这些边沿中的任何一条是两个垂直平面的交綫。在这种情况下,接触式探针可在上述每个垂直外面上收集数据点。然後,软件将数据点阵与平面对应起来,随後将平面重直交叉在一路。这些交綫代表那些边沿。
贯通孔和缆厩半径增长了应用探针的难度。我们可以采取视频方法直接测量那些边沿。边沿显示与工作台保持平行,是以与视频传感器的光轴垂直。
采集数据
图1a显示在什物零件上对一段弧进行视频测量。某些视频对象可主动跟踪一条边,收集各点,即使在它改变偏向的情况下也是一样。这个例子还解释,尽管每条边处在不合的平面上,但仍可采取视频方法测量。
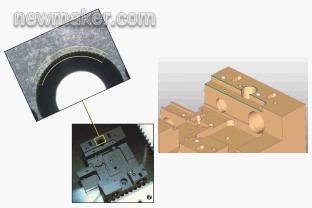
图1 某些视频对象可主动寻边,采集数据点
在同一个零件上,图2b显示两个蓝色平面之间必须平行。此外,必须知道每个外面偏离平面的程度(它的平面度)。这
沃森WSEN应用的最佳测量方法是激光。每个平面的核心都能被扫描到,最终获得数据点阵。每组数据对应一个平面。可测量到与每个平面的偏离度。此外,可比较两个平面之间的关系,以肯定其平行度。然则,并非所有零件都可以用激光检测,零件只有具备进行激光检测的重要特徵方可应用。

图2 对这个部件来说,最实用的传感器是激光,因为可在每个平面上对它的核心进行扫描
留意两个平面之间的垂直外面。测量较大年夜的平面须要恰当的工作距离,以避免与较高的外面产生碰撞(见图2a中的激光点及其路径)。
测量接近垂直外面的平面对一些激光三角测量法而言可能是个难题,因为该外面可能阻挡入射光或反射光。有些Through-The-Lens激光可以测量到垂直平面的底部。当这个零件在此地位时,它还有几个孔与上外面垂直。如不雅我们须要测量个一一个孔的圆柱轴对该孔的钻孔外面的垂直度,探针是最佳对象。然後,可用一个星形探针沿圆柱壁收集数据点。这些点阵分别对应一个平面和圆柱,可分别测量它们的角度关系。
如不雅工件是在一个地位上,上述的所有测量都可以在一个多元传感测量体系上实施。但并非单个传感器就能完成所有的测量。只有充分懂得每个传感器的最佳实用范围,才能为不合的测量类型选择最合适的传感器。(end)