MEMS技巧的成长使得惯性技巧范畴正在经历一场深刻的变更。惯性传感器是应用物体的惯性性质来测量物体活动情况的一类传感器,包含加快度计和陀螺。人们早就应用它们进行轮船、飞机和航天器的导航,近些年来人们又把这项技巧用于汽车的┞菲握、主动驾驶和导弹的制导等范畴。然则传统的惯性传感器因为体积大年夜、重量重、成本高等原因,极大年夜地限制了它们的应用。在这种背景下,以微电子机械体系为基本的微机械惯性传感器逐渐成长起来,个中微陀螺在惯性导航体系如航空航天和帆海事业中发挥着越来越重要的感化。除了传统的机械式振动陀螺外,各类新型陀螺也层出不穷,如静电支撑陀螺、磁支撑陀螺、微流体陀螺、超导陀螺等,这些新型陀螺在机能和尺寸上都有各自的优势,下面就流体陀螺的研究和成长应用
英国沃森WSEN进口传感器前景进话旧绍。
1 各类流体陀螺简介
流体类陀螺仪与传统陀螺仪比拟,因为没有吊挂质量块,构造大年夜大年夜简化,制造难度降低,更重要的是,省去了复杂的晃荡部件,其抗冲击、抗振动才能大年夜大年夜进步,特别合适在高冲击、高振动情况下应用。
流体陀螺的基来源基本理重要有两种:一种是在外界的┞菲握下贱体本身产生角动量,流体作为惯例的转子,形成测量外界角速度的角动量,当外界有角速度输入时,应用迁移转变流体与壳体的相对活动来产生敏感变更的输出旌旗灯号。另一种则是应用流系一切的科氏加快度来产生敏感变更的输出旌旗灯号。
1.1 气体对流陀螺
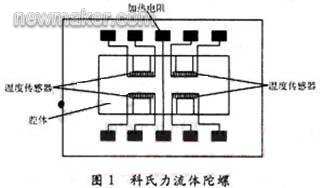
图1是由清华大年夜学设计、中国电子集团第13研究所加工而成的微流体陀螺仪。它是应用气体流速偏向在哥氏加快度感化下产生偏转的道理,采取微机械加工工艺制造的。此微流体传感器由隔热腔体、加热器和两对对称的温度传感器构成。加热器和温度传感器悬在腔体膳绫擎。加热器加热使其四周的气体温度升高,密度减小。在重力加快度的感化下,腔体内的气体产生对流。位于加热器相等距离上的一对温度传感器用来测量加热器两边的温差。器件封装在密封的隔热管壳内,防止外朝气流和温度对器件的影响。敏感偏向无哥氏加快度时,腔体内的加热气体只在重力加快度的感化下产生对流,如加热器程度偏向上两边相等地位汕9依υ度相等,两对温度传感器的输出相等。敏感偏向上有哥氏加快度时,腔体内的气体在重力加快度和外加角速度的结合感化下瓜代膨胀,加热器程度两边相等地位上出现温度差,两对温度传感器的输出就产生差别。若两对温度传感器采取热敏电阻,可与外接的两对参考电阻构成电阻电桥,如许经由过程电桥的输出电压旌旗灯号变更便可以测量出外界输入角速度的值。
1.2 射流微陀螺

传统陀螺是应用高速转子的定轴性和进动性敏感角速度,而射流陀螺是应用气流束在惯性力感化下产生偏转敏感角速度。因为气体的质量很小,没有迁移转变部件,故压电射流陀螺能遭受高冲击,并有寿命长、成本低等其他陀螺弗成媲美的长处。压电射流陀螺可用于导弹、飞机、舰船、工业主动化和机械人等技巧范畴,是测量和控制角速度、角加快度和角度等角参数的关键部件。它也是末制导炮弹和机械人姿势控制弗成缺氨赡惯性器件。
射流气体陀螺是应用强迫对流气体的气流束 (层流)和敏感元件的热阻效应来测量角速度的。今朝,采取MEMS技巧制造的射流微陀螺并不多。报道的射流气体微陀螺重要硬电驱动泵、轮回气流畅道及腔室、微喷嘴和热敏元件等构成。它构造简单,无晃荡检测质量,抗过载才能强,成本低,寿命长。它是在哥氏力定理基本上创造出来的,它经由过程压电泵驱动气体轮回,当陀螺有角速度旌旗灯号输入时,应用哥氏力使轮回气流束偏转来实现角参数的测量。轮回气流是由压电泵鼓励而产生的气体层流束(射流),旌旗灯号由两根平行的热敏丝R1,R2敏感。当输入角速度为∞时,因为哥氏力的感化,射流束偏离本来地点的射腔的中间肠位(见图2),偏离的角度和偏向决定于输入角速度,如许经由过程测量外围电路电压的变更便可测量出响应的加快度值。
1.3 ECF流体陀螺
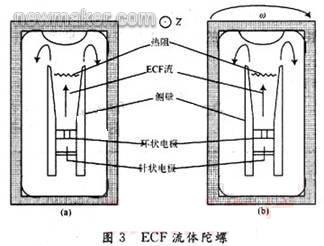
ECF(electro-conjugate fluid)流体是一种新型的流体材料,当在流体两端的电极上加上几千伏的电压时,ECF流体可以产生很强的流动,应用ECF流体的┞封种特点可以制造基于 ECF的流体陀螺。由日本东京工业大年夜学制造的┞封种流体陀螺如图3所示,其基来源基本理如下:在容器内部充斥ECF液体,当在如图3所示的电极上加上上千伏的电压时,便会产生很强的ECF液体冲击流,并往图3(a)所示偏向流动。当给陀螺如图3(b)所示以顺时针偏向扭转的角速度时,ECF的流动便向左边偏移,阁下流体的流动变更使得顶部的热阻阻值产生变更,进而可以检测出外部的电压值的变更,经由过程测量外部电压的变更便可以测量出外界输入角速度的值。
ECF流体所具有的特点为流体陀螺的研究开辟了新的门路,然则ECF流体陀螺所用的高电压却可能限制它的应用处合,设法寻找新的ECF材料或采取其它门路来降低所用的电压值是ECF流体陀螺扩大年夜应用处合的关键。
1.4 超流体陀螺
对于超流体陀螺(super fluid gyroscope)的研究是基于一种低温物理效应一超流体开展的。采取超流体的陀螺。其工作道理设计、可行性验证以及精度等级切实其实定等方面都须要进行大年夜量摸索性的理论研究和实验分析。但因为超流体独特的物理特点对于保持惯性有着优胜的潜力,研究者们正在积极开展相干工作,成长基于超流体的惯性陀螺仪。因为超流体流动根本上可以认为没有阻力,当承载容器与其产生切向活动时,超流体不会像平日的流体一样因为液体的┞烦性力产生随动,而是保持本来的状况。也就是说低阻使之对于迁移转变可能出现出异常优胜的惯性。如许超流体与承载容器间就出现了相对流动,检测这个活动速度或它的某种放大年夜量就可以获点缀动速度的信息。
因为超流体的┞烦滞系数很低,流体间以及流体对四周活动的阻尼很小,具有很好的惯性,而惯性导航体系对陀螺的请求恰是须要其保持优胜的惯性系。应用超流体效应检测角速度,在道理上具有远远高于惯例陀螺的机能潜力,实用于各类须要高精度陀螺的场合。不过,因为该偏向的研究方才展开,不成熟的环节还较多,若何将道理与实际的应用相结合,探寻更有效的高精度筹划,完美配套技巧以降低制造成本、缩小体积重量都是有待进一步研究的问题。
2 结 语
本文根据微流体陀螺的不合道理介绍了几种常见的MEMS微流体陀螺,并对它们的基来源基本理、优缺点和应用前景进行了简单的介绍,这几种MEMS微流体陀螺都具有体积小、重量轻、成本低和抗高冲击等独特长处,使得它们都较合适应用在惯性导航、主动控制等相干范畴,因而具有广阔的应用前景,跟着微机电技巧的成长和新型材料的应用,流体陀螺的种类将进一步多样化,微流体陀螺将在惯性导航和主动控制等方面发挥越来越重要的感化。(end)