摘要陀螺加快度计是计谋导弹平台体系中的核心器件,颇┞俘常工作时必须要有响应的伺服回路来包管仪表具有足够的静态和动态机能,本文比较了模仿伺服回路和数字伺服回路的特点,阐述了陀螺加快度计的工作道理,重点商量了基于DSP(数字旌旗灯号处理)的数字伺服回路的具体实现筹划并给出了测试曲线,得出了数字伺服回路可用来替代惯例的模仿伺服回路的结论,并指出数字伺服回路是陀螺加快度计伺服回路技巧成长的一个重要偏向。
关键词陀螺加快度计,计谋导弹,数字控制。
1引言
陀螺加快度计正常工作时必须要有响应的伺服回路来包管仪表具有足够的静态和动态机能,今朝常用的伺服回路是用模仿电路实现的,这种惯例的┞菲握方法具有精度较高、技巧成熟、易于实现等长处,但其缺点也很明显:
a) 构成校订环节的电阻电容等元器件的特点易受情况前提影响、难以实现复杂的┞菲握规律等。对于陀螺加快度计如许高精度的仪表来说,其机能在很大年夜程度上依附于伺服回路。是以,一旦因为电阻、电容值的漂移引起校订环节参数的变更,将会直接影响到全部仪表的机能。
b) 别的,陀螺加快度计在导弹(火箭)的┞符个飞翔过程中,其工作情况是复杂多变的,惯例的┞菲握筹划有时难以知足其机能的请求,跟着近年来各类现代控制理论的日渐成熟以及微电子技巧的飞速成长,在陀螺加快度计上采取数字控制以实现复杂控制规律成为了可能。
自20世纪80年代初的DSP芯片出生以来,在十多年的时光里获得了飞速的成长,今朝在通信与信息体系、旌旗灯号与信息处理、主动控制、雷达、航空航天等很多范畴获得广泛的应用[2]。
DSP芯片即数字旌旗灯号处理器,是一种具有特别构造的微处理器,其内部采取法度榜样和数据分开的哈佛构造,具有专门的硬件乘法器,广泛采取流水线操作,供给特别的DSP指令,可用来快速实现各类复杂的数字旌旗灯号处理算法。
图6为模仿校订环节和数字校订收集的频率响应曲线比较,显然两者的幅频特点是一致的,而相频特点方面数字校订统高频处要滞后于模仿环节,这主如果由零阶保持器引起的。
2陀螺加快度计的基来源基本理
2.1陀螺加快度计的根本构成
大年夜功能构成的角度来说,陀螺加快度计重要由3部分构成:表头构造部分、伺服控制回路以及输出装配。个中,表头构造包含了仪表内环、外环支承方法;伺服控制回路广义上包含内环的角度传感器、控制电路以及外环的力矩电机等;输出装配包含变磁阻传感器、输出变换电路等。
2.2陀螺加快度计的活动方程
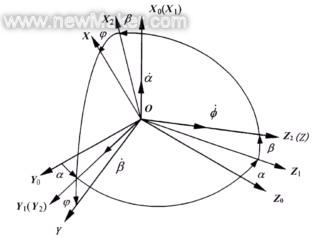
图1所示为陀螺加快度计的几个坐标系,个中,X0Y0Z0为与基座固联的坐标系,X1Y1Z1为与外环固联的坐标系,X2Y2Z2为与内环固联的坐标系,XYZ为与转子固联的坐标系。由此,可以获得以下活动方程:
数字伺服回路的设计可分为两个方面:一是电路硬件方面的设计;二是控制算法(软件)方面的设计。
图1陀螺加快度计中的坐标系
内环方程:

外环方程:
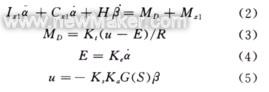
式中MD——力矩电机的力矩;
Ks——旌旗灯号传感器的比例系数;
Kt——力矩电机的力矩系数;
Ka——放大年夜器的等效增益;
R——力矩电机绕组的电阻;
Ke——反电动势系数;
G(S)——校订收集传递函数。
陀螺加快计是加快度计的一种,是计谋导弹和运载火箭导航体系中的核心器件,其感化是敏感载体的加快度,大年夜而获得载体导航所必须的加快度、速度和地位等信息,控制体系根据这些参数就可声调节载体的飞翔速度和控制发念头关机[1]。今朝,世界上各个控制和拥有计谋核兵器、载人航天器的航天大年夜国,如美国、俄罗斯、法国等,无一例外埠在弹道导弹和运载火箭的导航体系中采取了陀螺加快度计,如美国的MX导弹、俄罗斯的白杨-M导弹等。这是因为陀螺加快度计具有其它种类的加快度计所不具有的特点——精度高(一般惯导级的陀螺加快度计能达到10
-4~10
-6g0)、量程宽(20~40g0);固然它同时具有构造复杂、成本高的缺点。
由式(1)~(5)可得出陀螺加快度计的简化体系框图,见图2。
图2陀螺加快度计体系框图
K0=KsKaKt/R为电子线路部分的总增益2.3陀螺加快度计的工作道理
该DSP芯片是全部数字控制的核心,其重要本能机能为:

上述中,Ha是外环的迁移转变角速度,可以直接测得,大年夜而也就获得了加快度。经由过程积分还可以得出速度和位移。
然而,仪表在实际的工作过程中,当外环存在干扰力矩MX1时,角动量H将向MX1偏向进动,使得β比赛渐增大年夜,当H和MX1重应时,仪表因掉去一个自由度而不克不及正常工作。是以,陀螺加快度计必须要有由角度传感器、控制电路和力矩电机构成的伺服回路来包管H和外环轴之间的垂直,同时给全部加快度计体系供给足够的静态和动态特点。
3基于DSP的数字伺服回路设计
3.1数字控制的硬件设计
3.1.1数字控制CPU的选择
大年夜道理上讲,任何具备数字旌旗灯号处理才能的微处理器都可以作为数字控制的CPU,如X86微处理器、单片机、DSP等,个中X86系列微处理器运算才能强,但须要复杂的外部设备合营才能正常工作,在对体积请求较高的嵌入式控制体系中应用较少;单片机在一个芯片内集成了包含输入、输出、存储器、算术处理单位等模块,只需很少的外设即可组合最小体系,但其缺点是运算速度较慢,浮点处理才能弱(必须经由过程转换法度榜样才能实现浮点加法和乘法,须要大年夜量的指令周期,难以知足对及时性请求高的场合);而DSP有专门的浮点型DSP芯片,片内集成有常用的模块,构成最小体系所需的外设较少,最重要的是DSP芯片不仅运算速度快、效力高(在单指令周期内就能完成一次浮点乘法和一次浮点加法),并且供给了特别合适于数字旌旗灯号处理的指令体系。推敲到数字控制体系实现的复杂水平和软件编制的高效性,在本体系中采取TI公司的第3代DSP产品——TMS320C32,其重要特点有(TMS320C3250):[3]
a) 指令周期为40 ns,运算才能为275MOPS(百万次操作/s),50MFLOPS(百万次浮点操作/s),25MIPS(百万条指令/s);
b) 32位高机能CPU,16/32位整数运算,32/40位浮点数运算;
c) 微处理器/微计算机方法可选;
d) 寻址空间达16M(32位字);
e) 一个串行口,两个32位准时器,两个通道的DMA;
f) 丰富高效的指令体系。
3.1.2数字控制的硬件构成(见图3)
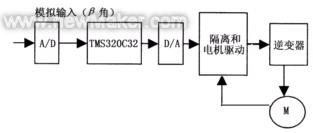
图3数字控制的硬件构成
由第2节陀螺加快度计的工作道理可知,伺服回路的最重要感化就是根据内环偏角β角旌旗灯号产生响应的力矩,大年夜而使得β角保持在一个异常小的状况,同时付与仪表足够的动、静态机能。
a) A/D和D/A。
仪表内环角旌旗灯号经前置变换放大年夜器(完成交换放大年夜、解调、低通滤波等功能)放大年夜后输出至A/D转换,根据全部仪表工作
英国沃森特点的请求,内环偏角β请求小于2〃,如不雅采取数字控制对β角的分辨率应当在2〃之内。设Δβ=2〃,经前放后输出为

β角旌旗灯号对应电旌旗灯号为200 mV/(°),前放放大年夜系数一般在20~30之间,推敲到A/D器件的输入旌旗灯号范围为±5V,此时12位的A/D和D/A转换器的分辨率为2.5 mV,知足仪表的请求。
2) 转换速度。
全部加快度计体系的闭环带宽一般低于100 Hz,根据喷鼻农采样定理,只要采样周期T≤5 ms即可,工程上一般采样频率取体系截止频率的10~20倍,推敲到算法运行时光和D/A转换时光,取转换速度在200 μs之内的A/D转换器,就可以知足体系及时性的请求,而D/A转换的速度一般均在几微秒至几十微秒之间。是以只需选择输出旌旗灯号范围在±5 V之间的通用型器件即可。
根据上述两个原则,本体系中采取了AD公司的高速12位A/D转换器AD674B,其典范转换时光为15 μs,而D/A器件则选用了AD7845,典范转换时光为8 μs。实验结不雅注解,这两种高速器件能包管加快度计数字控制体系具有优胜的及时性。
b) TMS320C32。
1) 攫取AD转换结不雅;
2) 数字旌旗灯号处收成完成模仿校订环节的功能,并且可以很轻易实现各类现代控制筹划);
3) 将数字处理完毕的旌旗灯号转换成模仿旌旗灯号,供给给下一级驱动电路。
c) 隔离和电机驱动。
将数字电路、电机驱动电路和后级功率电路隔离,并且根据给定旌旗灯号去驱动无刷力矩电机工作;有关无刷力矩电机控制和驱动的具体筹划可参阅┞峰酌文献[4]。
d) 逆变器。
电机的功率电路部分,本体系中采取无刷力矩电机作为履行元件,其构造情势为三相六对极,是以逆变器采取三相逆变桥构造,桥臂的功率管可采取晶体管或场效应管。
3.2数字控制的软件设计
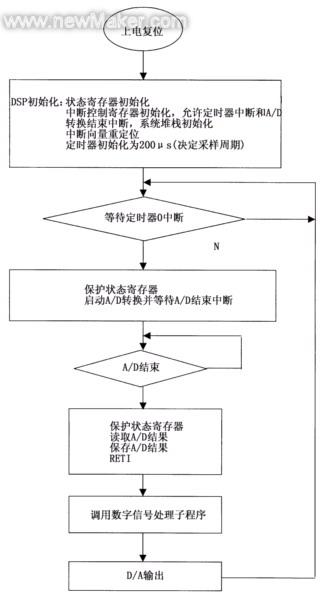
a) 数字控制的总体流程。
根据加快度计体系的带宽(小于100 Hz)请求,以及A/D和D/A的转换速度,数字控制体系的采样周弃取为Ts=200μs,在一个采样周期的时光距离之内,将完成A/D转换、数字旌旗灯号处理、D/A输出等功能,其流程图见图4。
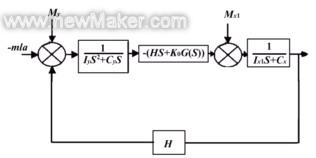
图4数字控制的总体流程图
b) 数字旌旗灯号处理算法。
设计数字伺服体系时,一般有两种办法:
1) 计整洁是将本来的模仿校订环节经由过程双线变换办法离散化,这种筹划的好处是可以直接应用原有模仿体系的研究结不雅,但缺点是这种数字控制体系在机能上弗成能超出本来的模仿体系[5]。
2) 筹划二是根据体系机能请求,直接在离散域内设计数字控制器,如许可以或许充分应用近年来已经成熟的现代控制理论——最优控制、自适应控制、鲁棒控制等来进行设计,可以对体系进行复杂的动态补偿。
1) 分辨率。
本文分别采取了上述两种办法,设计了两个不合的数字控制器,个中在原有模仿体系基本上经由过程离散化获得数字控制器的办法是验证数字伺服体系是否正常工作的一个简单而又重要的手段。设模仿校订环节的传递函数为
采取Tustin变换对其离散化:

TMS320C32实现上述算法的过程类似于通俗的IIR滤波器,可采取以下标准情势:

其构造情势如图5所示。
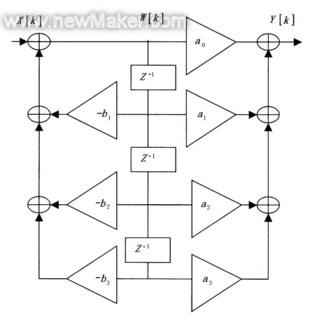
图5三阶节的标准实现情势
在软件编制时充分应用了TMS320C32指令体系的两种特点:乘法/累加并行指令和轮回寻址。前者许可在单个周期内完成一次浮点乘法和一次浮点加法,后者应用一个有限长度的缓冲存储器(对于本体系来说为3个内部存储器单位)轮回存放中心延时节点值W[k]。
2张宏伟等. DSP芯片的道理与开辟应用(第2版). 北京:电子工业出版社,2000.
实际测试时经由过程监控法度榜样测得上述三阶节的算法单次运行仅耗时6 μs阁下(DSP的晶振频率为40 MHz),而同样算法如不雅采取单片机80C196系列来实现的话,仆砟瓯将在5 ms阁下,由此可以明显看出DSP在处理复杂算法时的高效性。

采样周期Ts=200 μs
当外环轴偏向有视加快度ax1时,在内环轴大将产生惯性力矩mlax1,在幻想状况下,即内环、外环没有干扰力矩时,按陀螺进动道理,转子将带动内、外框架一路进动,大年夜而产生陀螺反感化力矩Ha,稳态时,惯性力矩将精确地被陀螺力矩所均衡,即:
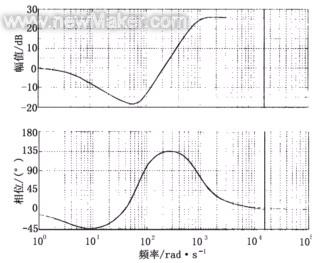
图6模仿校订环节和数字校订收集的波特图比较
图7为采取模仿校订环节和DSP数字控制器的陀螺加快度计体系的实测阶跃响应曲线,显然这两种控制方法的效不雅是一致的,调节时光为101 ms,超调量为42%;图8为采取自适应控制算法的体系阶跃响应曲线,可以看出,体系的调节时光比通俗的数字控制筹划要快(74 ms),并且超调量削减了1/4阁下(31%)。
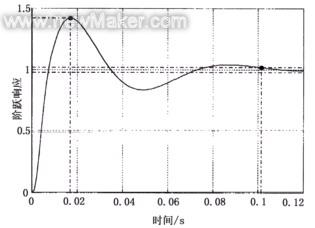
图7 采取模仿校订环节和直接数字控制器时体系的阶跃响应
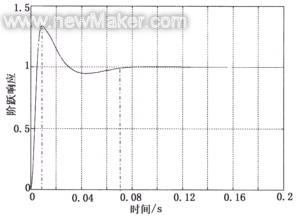
图8采取自适应算法时体系的阶跃响应
4结论
大年夜以上实验结不雅可以看出,采取基于DSP技巧实现的陀螺加快度计数字伺服回路在机能上要优于惯例的模仿控制方法,并且具有参数一致性好、可实现复杂控制规律等明显特点,可用来替代惯例的模仿伺服回路,是陀螺加快度计伺服回路控制技巧成长的一个重要偏向。
参考文献
1陆元九等. 惯性器件(下). 北京:宇航出版社,1993.
3TMS320C3x User's Guide.Texas Instruments,1997.
4严小军等. 无刷力矩电机在陀螺加快度表上的应用. 导弹与航烫舨ω技巧,2002(1).
5王福瑞等. 单片微机测控体系设计大年夜全. 北京:北京航空航天大年夜学出版社,1998.(end)